

Introduction
Visit my YouTube channel
Please Check Video Before reading this post....the Video is in 2 parts....
Part-1 Of quad....
A Drone is a very expensive gadget(product) to buy. In this post I am going to discuss, how I make it at cheap?? And How can you make your own like this at cheap price…Well in India all the materials(motors, ESCs etc.) are very expensive(at least for me). So I decided to make it on, as cheapest as possible. The frame and the Flight Controller is DIY. The frame is made up of scraped aluminium antenna(bar), aluminium celling fan blade and Woods. Arduino UNO along with MPU6050(gyro+Accle) is used as a flight Contrller.
Step-1:-Materials Used
These are the materials Used for my Drone You can use any parts/materials as your requirement. If you want to make it as cheap as possible then you can go with the material list below.
1) 1000KV Brushless motor*4pcs
2) 30 Amp ESCs*4pcs
3) 1045 Propeller*4pcs
4) Arduino UNO + MPU6050
5) Perfboard (verroboard)
6) 1.5k,1k and 300E resistors and 1pcs LED. 7) Heat Shrink tube (I am using Electrical Insulation Tape)
8) Double Sided Tape, Soldering Iron, Soldering Wire etc.
9) A plastic Box (for Electronics)
10) 2200 mah or Higher li-po battery.(minimum 30C recommended)
11) Aluminium bar(hollow), Aluminium plate and Woods(soft).
Link of the all materials used in this project is given in the part-1 video Description.....













Step-2:-Motor mounting
When you bought the Motors the Motor mount and some screws comes with it. mount the aluminium motor mount using the screws comes with it. (see picture)






Step-3:-How to make a frame…
I am using old aluminium (yagi) antenna, Soft Wood, and aluminium plate(fan Blade) to make frame. Cut 4 pcs of aluminium bar each of 20cm. Centre plate Dimention is about 11*18cm….The wooden Motor mount is about 10cm long and Diameter of 4.5cm (where motor mounted). Fix the bars of aluminium with Center plate using screws( as your Requirement) and slide in the motor mount under the aluminium bars and……Here your frame is ready….(check Pictures) also a video of frame Work is on my Youtube Channel…..Check that out..



Step-3:-Mounting all things (ESCs and Motors to Frame)
Now mount the motors to it’s wooden motor mount using screws and Nuts (any types) and connect the ESC wire with it (Randomly) and fix the ESCs using Electrical tape or zip ties in my case it’s Electrical tape (it’s cheaper than Zip ties). After connecting all Motors and ESCs cut the +ve and –ve Wire of ESCs and connect all ESCs using Wires or PDB as your setup..I am Using Wires Because there is no space in my frame for ESCs…..And you’re Done…..
******Caution:-Remove all Props while setup…and Don’t Try to Fly Inside the Home….




Step-4:- Flight Controller
Make a Flight Controller using Arduino UNO and MPU6050…My flight controller is based on the Brokking’s YMFC-AL and it’s a Auto leveling Quad…make the connections as Diagram below……

Step-5:- Connecting the ESCs and receiver to FC
********Don’t Connect ESCs BEC wire(5 volt)…only connect signal wire****** ********And power the receiver using Arduino’s 5 volt supply*******
Now connect the signal wires of ESCs as Describe Below….also shown in the Diagram…
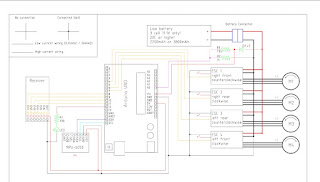
ESC connection…….
Digital pin-4 to ESC1 (Right Front CCW) Digital pin-5 to ESC2 (Right rear CW)
Digital pin-6 to ESC3 (Left rear CCW)
Digital pin-7 to ESC4 (Left front CW)
Receiver Connection….
Digital pin8 to Receiver Channel 1
Digital pin9 to Receiver Channel 2
Digital pin10 to Receiver Channel 3
Digital pin11 to Receiver Channe 4
Step6: Flight Controller Setup (Upload the Sketch)
******Don’t Connect the Flight Battery at This Time******
Now Download the Arduino Sketch below and extract the Zip file..you will find YMFC-AL schematic, Readme file, ESC calibration Code, Setup Code and Flight Controller Code…..
Also Download Arduino IDE...... Here.....
Download ZIP File Here
1)….At first Upload code and open Serial monitor at 56000b and follow the Steps in the Video below…
2) If no Error occurred then upload the ESC calibration Sketch after uploading the code…put Your transmitter at full t hrottle and connect the Flight Battery after some beeps put Down the throttle (I think this method not works on all types and brands of ESCs,,,,But for mine it’s works perfectly)……
3) After uploading the ESC calibration sketch…Upload the Flight Controller ready….
Buy Creality CR-10 3D printer... and help my projects....
Step7:Electronics Box installing and prop mounting.







After completing all electronics works put the all electronics in the Electronics box and complete all wirings and stuffs…..Now mount the CCW propellers to CCW motors an You are Ready to Fly………. d CW prop to CW motors…..And The Hardest part of making this quad is to Tune PIDs…….as your Design… I’ve Broke 2 pairs of Prop and Electronics box while trying to fly it….

Soooooo,,,,,,Have a Good Fly…………
If you like this project then please give a like to this post and Please Subscribe to my Channel…Also consider Support my future Projects Through my Patreon campaign or Donate Through Paypal….Even an small amount can help a lot.
Visit my YouTube channel
Please Check Video Before reading this post....the Video is in 2 parts....
Part-1 Of quad....
Part-2 of quad.......
A Drone is a very expensive gadget(product) to buy. In this post I am going to discuss, how I make it at cheap?? And How can you make your own like this at cheap price…Well in India all the materials(motors, ESCs etc.) are very expensive(at least for me). So I decided to make it on, as cheapest as possible. The frame and the Flight Controller is DIY. The frame is made up of scraped aluminium antenna(bar), aluminium celling fan blade and Woods. Arduino UNO along with MPU6050(gyro+Accle) is used as a flight Contrller.
Step-1:-Materials Used
These are the materials Used for my Drone You can use any parts/materials as your requirement. If you want to make it as cheap as possible then you can go with the material list below.
1) 1000KV Brushless motor*4pcs
2) 30 Amp ESCs*4pcs
3) 1045 Propeller*4pcs
4) Arduino UNO + MPU6050
5) Perfboard (verroboard)
6) 1.5k,1k and 300E resistors and 1pcs LED. 7) Heat Shrink tube (I am using Electrical Insulation Tape)
8) Double Sided Tape, Soldering Iron, Soldering Wire etc.
9) A plastic Box (for Electronics)
10) 2200 mah or Higher li-po battery.(minimum 30C recommended)
11) Aluminium bar(hollow), Aluminium plate and Woods(soft).
***Link for India***
***For Out of India.......(Banggood)***
***Gearbest...***
Link of the all materials used in this project is given in the part-1 video Description.....











Step-2:-Motor mounting
When you bought the Motors the Motor mount and some screws comes with it. mount the aluminium motor mount using the screws comes with it. (see picture)






Step-3:-How to make a frame…
I am using old aluminium (yagi) antenna, Soft Wood, and aluminium plate(fan Blade) to make frame. Cut 4 pcs of aluminium bar each of 20cm. Centre plate Dimention is about 11*18cm….The wooden Motor mount is about 10cm long and Diameter of 4.5cm (where motor mounted). Fix the bars of aluminium with Center plate using screws( as your Requirement) and slide in the motor mount under the aluminium bars and……Here your frame is ready….(check Pictures) also a video of frame Work is on my Youtube Channel…..Check that out..



Step-3:-Mounting all things (ESCs and Motors to Frame)
Now mount the motors to it’s wooden motor mount using screws and Nuts (any types) and connect the ESC wire with it (Randomly) and fix the ESCs using Electrical tape or zip ties in my case it’s Electrical tape (it’s cheaper than Zip ties). After connecting all Motors and ESCs cut the +ve and –ve Wire of ESCs and connect all ESCs using Wires or PDB as your setup..I am Using Wires Because there is no space in my frame for ESCs…..And you’re Done…..
******Caution:-Remove all Props while setup…and Don’t Try to Fly Inside the Home….




Step-4:- Flight Controller
Make a Flight Controller using Arduino UNO and MPU6050…My flight controller is based on the Brokking’s YMFC-AL and it’s a Auto leveling Quad…make the connections as Diagram below……

Step-5:- Connecting the ESCs and receiver to FC
********Don’t Connect ESCs BEC wire(5 volt)…only connect signal wire****** ********And power the receiver using Arduino’s 5 volt supply*******

ESC connection…….
Digital pin-4 to ESC1 (Right Front CCW) Digital pin-5 to ESC2 (Right rear CW)
Digital pin-6 to ESC3 (Left rear CCW)
Digital pin-7 to ESC4 (Left front CW)
Receiver Connection….
Digital pin8 to Receiver Channel 1
Digital pin9 to Receiver Channel 2
Digital pin10 to Receiver Channel 3
Digital pin11 to Receiver Channe 4
******Don’t Connect the Flight Battery at This Time******
Now Download the Arduino Sketch below and extract the Zip file..you will find YMFC-AL schematic, Readme file, ESC calibration Code, Setup Code and Flight Controller Code…..
Also Download Arduino IDE...... Here.....
Download ZIP File Here
1)….At first Upload code and open Serial monitor at 56000b and follow the Steps in the Video below…
2) If no Error occurred then upload the ESC calibration Sketch after uploading the code…put Your transmitter at full t hrottle and connect the Flight Battery after some beeps put Down the throttle (I think this method not works on all types and brands of ESCs,,,,But for mine it’s works perfectly)……
3) After uploading the ESC calibration sketch…Upload the Flight Controller ready….
Buy Creality CR-10 3D printer... and help my projects....
Step7:Electronics Box installing and prop mounting.







After completing all electronics works put the all electronics in the Electronics box and complete all wirings and stuffs…..Now mount the CCW propellers to CCW motors an You are Ready to Fly………. d CW prop to CW motors…..And The Hardest part of making this quad is to Tune PIDs…….as your Design… I’ve Broke 2 pairs of Prop and Electronics box while trying to fly it….

Soooooo,,,,,,Have a Good Fly…………
If you like this project then please give a like to this post and Please Subscribe to my Channel…Also consider Support my future Projects Through my Patreon campaign or Donate Through Paypal….Even an small amount can help a lot.
- And if you have any confusion or suggestion about the project Comment Below.
I like your frame and... The idea..... To keep this thing as cheap as possible.......
ReplyDeleteWhich receiver and transmitter you have used
ReplyDeletePlease tell fast
It's Flysky Fs-i6x transmitter and X6B Receiver
DeleteI did everything right, caliberi, I put the energy, using the YMFC-AL_esc_calibrate, all the motors turn exactly at the same RPM, but when I use the YMFC-AL_Flight_controller one of the motors constantly rotates more than the other 3, and does not respond correctly the command to turn right just to the left, can you help me?
ReplyDeletePlease give the Arduino code
ReplyDeleteAwessome! Arduino coding level = God! If You add an I2c Baro sensor (like GY-68, BMP180) for altitude hold, and a speaker to battery low alert and easy find lost quadcopter this project will be unbeatable!
ReplyDeletehi how i make the values of pid
ReplyDelete